เครื่องเซาะร่อง CNC V คืออะไร
ด้วยการพัฒนาอย่างรวดเร็วของระบบอุตสาหกรรมในประเทศของฉัน บริษัทต่างๆ จำนวนมากขึ้นเรื่อยๆ มีข้อกำหนดที่สูงขึ้นเรื่อยๆ ในกระบวนการดัดแผ่นโลหะ รวมถึงแผ่นอื่นๆ บางบริษัท ดังนั้น บริษัทต่างๆ จึงเลือกใช้กระบวนการดัดแผ่นโลหะมากขึ้น จำเป็นต้องดำเนินการกัดเซาะร่องล่วงหน้าในตำแหน่งดัดงอเนื่องจากปัจจัยการแข่งขันในตลาด การแสวงหาความสวยงามของผลิตภัณฑ์ของลูกค้าเพิ่มมากขึ้นตามลำดับ ดังนั้น กระบวนการเซาะร่องจึงกลายเป็นกระบวนการที่จำเป็นก่อนกระบวนการดัดงอ ด้วยกระบวนการไสที่ลงลึกอย่างต่อเนื่อง อุตสาหกรรมต่างๆ เริ่มใช้กระบวนการเซาะร่องมากขึ้น หลายแห่งรวมถึงอุตสาหกรรมที่มีเทคโนโลยีสูงบางแห่งที่ใช้กระบวนการเซาะร่องด้วย อุตสาหกรรมการใช้งานหลักของกระบวนการไส ได้แก่: อุตสาหกรรมเบา, เครื่องใช้ไฟฟ้า, รถยนต์, การแปรรูปสแตนเลส, การตกแต่งสถาปัตยกรรม, อุตสาหกรรมเฟอร์นิเจอร์, อุปกรณ์ครัว, อุปกรณ์ระบายอากาศ, การบินและอวกาศ, ลิฟต์, แชสซี, ตู้ ฯลฯ กระบวนการเซาะร่องรวมถึงการประมวลผลร่องรูปตัว V, การประมวลผลร่องรูปตัว U และการประมวลผลร่องที่ผิดปกติ การลบมุมขอบแผ่น การตัดแผ่นและการไส ฯลฯ

1. วัตถุประสงค์และการใช้การออกแบบและผลิตเครื่องเซาะร่อง
1.1 หลังจากที่เครื่องเซาะร่องทำการเซาะร่องรูปตัว V บนแผ่น มุมการดัดของแผ่นจะง่ายต่อการขึ้นรูปในระหว่างกระบวนการดัด และมุม R หลังจากการขึ้นรูปจะมีขนาดเล็กมาก ชิ้นงานไม่บิดหรือเสียรูปได้ง่าย ความตรง มุม ความแม่นยำมิติ และรูปลักษณ์ของชิ้นงานหลังการดัดและขึ้นรูปล้วนให้ผลลัพธ์ที่ดี
1.2 หลังจากที่แผ่นโลหะถูกเซาะร่อง V ด้วยเครื่องเซาะร่อง แรงดัดที่ต้องการจะลดลง เพื่อให้สามารถดัดแผ่นที่ยาวและหนาบนเครื่องดัดขนาดเล็กที่มีระวางน้ำหนักได้ ซึ่งจะช่วยลดการใช้พลังงานของเครื่อง
1.3 เครื่องเซาะร่องยังสามารถดำเนินการมาร์กตำแหน่งล่วงหน้าบนแผ่นงานได้ เพื่อให้ชิ้นงานสามารถรับประกันความแม่นยำสูงในขนาดของขอบดัดในระหว่างกระบวนการดัด
1.4 ภายใต้ข้อกำหนดกระบวนการเซาะร่องพิเศษ เครื่องเซาะร่องสามารถแปรรูปร่องรูปตัว U บนพื้นผิวของแผ่นบางแผ่น เพื่อให้พื้นผิวที่ผ่านการแปรรูปมีความสวยงาม กันลื่น และใช้งานได้จริงสำหรับการประกบ
2. การจำแนกประเภทและโหมดการประมวลผลของเครื่องเซาะร่อง
2.1.เครื่องเซาะร่องแบ่งออกเป็นสองประเภท: เครื่องเซาะร่องแบบแยก และเครื่องเซาะร่องโครงสำหรับตั้งสิ่งของ (แนวนอน)
2.2. เครื่องเซาะร่องแนวตั้งประกอบด้วยเครื่องเซาะร่องแบบด้ามจับเดี่ยวและเครื่องเซาะร่องแบบด้ามจับคู่ เครื่องเซาะร่องหลังเครื่องมือเดียวใช้การเซาะร่องแบบตัดขวา เครื่องเซาะร่องผู้ถือเครื่องมือคู่สามารถแบ่งออกเป็นการเซาะร่องแบบตัดขวาและการเซาะร่องแบบตัดซ้าย นอกจากนี้ยังสามารถใช้กับตัวจับยึดเครื่องมือสองตัวเพื่อดำเนินการกลึงร่องแบบตัดขวาและตัดซ้ายพร้อมกันได้ นอกจากนี้ยังสามารถใช้การเซาะร่องไปมาแบบสองทิศทางได้อีกด้วย
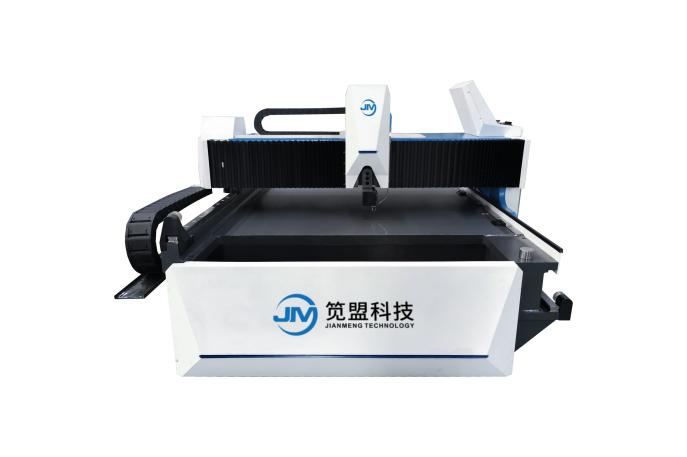
2.3. เครื่องเซาะร่องโครงสำหรับตั้งสิ่งของสามารถแบ่งออกเป็นเครื่องเซาะร่องแบบไดรฟ์เดียวและเครื่องเซาะร่องแบบไดรฟ์คู่ เครื่องเซาะร่องทั้งสองเครื่องใช้โหมดการตัดเฉือนด้านขวา

เครื่องเซาะร่อง v ความเร็วสูงแนวนอน
เครื่องเซาะร่องวีไดรฟ์คู่แนวนอน

เครื่องเซาะร่อง v ความเร็วสูงแนวตั้ง

เครื่องเซาะร่อง v แนวตั้งไปมา

เครื่องเซาะร่อง v สี่ด้านอัตโนมัติเต็มรูปแบบ
3. ประเภทการบีบอัดและการหนีบของเครื่องเซาะร่อง
3.1.เครื่องเซาะร่องแนวตั้งสามารถแบ่งออกเป็นอุปกรณ์ไฮดรอลิก อุปกรณ์นิวแมติก และอุปกรณ์ผสมก๊าซและของเหลว
3.2 เครื่องเซาะร่องโครงสำหรับตั้งสิ่งของ เช่นเดียวกับเครื่องเซาะร่องแนวตั้ง ยังแบ่งออกเป็นอุปกรณ์ไฮดรอลิก อุปกรณ์นิวแมติก และอุปกรณ์ผสมก๊าซและของเหลว
4.โครงสร้างของเครื่องเซาะร่อง
4.1. เครื่องเซาะร่องแนวตั้งสามารถแบ่งออกเป็นสองประเภท: การเชื่อมแบบเต็มตัวและการเชื่อมต่อแบบสกรู เนื่องจากการเชื่อมต่อแบบสกรูจะทำให้เกิดการหลวมและการเสียรูปของการเชื่อมต่ออุปกรณ์ในระหว่างการยกและการขนส่งอุปกรณ์ โดยทั่วไปจะใช้ประเภทการเชื่อมทั้งตัว ชิ้นส่วนขนาดใหญ่ที่เชื่อมหลักของเตียงเครื่องจักรได้รับการอบคืนตัวด้วยก๊าซธรรมชาติเพื่อขจัดความเครียด หลังจากการเชื่อม เครื่องจักรทั้งหมดจะถูกประมวลผลโดยใช้เครื่องแมชชีนนิ่งเซ็นเตอร์ CNC แบบโครงสำหรับตั้งสิ่งของ
4.2. เครื่องเซาะร่องโครงสำหรับตั้งสิ่งของใช้เทคโนโลยีการเชื่อมแบบเต็มตัว เตียงและโครงสำหรับตั้งสิ่งของทั้งหมดได้รับการอบคืนตัวด้วยแก๊สธรรมชาติเพื่อขจัดความเครียด จากนั้นเครื่องจักรทั้งหมดจะถูกประมวลผลโดยใช้เครื่องแมชชีนนิ่งเซ็นเตอร์ CNC แบบโครงสำหรับตั้งสิ่งของ
4.3 โครงสร้างตัวเครื่องของเครื่องเซาะร่องแนวตั้งประกอบด้วยคอลัมน์ด้านซ้ายและขวา โต๊ะทำงาน แผ่นดันที่วางเครื่องมือ คานขวาง โครงเกจด้านหลัง ที่วางเครื่องมือการวางแผน และส่วนประกอบหลักอื่น ๆ
4.4.โครงสร้างตัวเครื่องของเครื่องเซาะร่องโครงสำหรับตั้งสิ่งของประกอบด้วยส่วนประกอบหลัก เช่น โต๊ะทำงาน โครงโครงสำหรับตั้งสิ่งของ และที่วางเครื่องมือ
4.5 เครื่องเซาะร่องแนวตั้งและโครงสำหรับตั้งสิ่งของไม่เพียงแต่ขจัดความเครียด แต่ยังรับประกันผลลัพธ์ที่ยอดเยี่ยมของการพ่นทรายอีกด้วย
4.6 แผงโต๊ะทำงานของเครื่องเซาะร่องแนวตั้งและโครงสำหรับตั้งสิ่งของทั้งหมดเชื่อมด้วยเหล็กหมายเลข 45 โครงเชื่อมด้วยแผ่นเหล็ก Q345 เครื่องมือกลโดยรวมมีความแข็งแกร่งที่ดีและทนทาน
5. หลักการทำงานและการขับขี่ของเครื่องเซาะร่อง
5.1. การขับเคลื่อนการทำงานของเครื่องเซาะร่องแนวตั้ง
ก. โต๊ะทำงานของเครื่องเซาะร่องได้รับการออกแบบให้มีความสูงตามหลักมนุษย์ประมาณ 850 มม. พื้นผิวการทำงานถูกออกแบบให้มีตารางวัสดุ 9crsi ที่มีความแข็งแรงสูง อยู่ใต้เส้นทางวิ่งของที่จับเครื่องมือ โดยมีความแข็งโครเมียม 47-50 องศา เพื่อให้มั่นใจถึงความทนทานของพื้นผิวการทำงาน
b. ตัวขับเคลื่อนของเครื่องเซาะร่องประกอบด้วย X, Y, Z และ W โดยมีการติดตั้งแกน X, แกน Z และแกน W ตามลำดับบนคานแผ่นแรงดัน แกน X คือแกนการประมวลผลและการตัด ซึ่งควบคุมความยาวของการแปรรูปโลหะแผ่นเป็นหลัก ขับเคลื่อนด้วยชั้นวางแบบเฮลิคอล 3 โมดูล เฟืองเกลียวแบบอัลลอย มอเตอร์สปินเดิล 5.5 kW และตัวลดสตาร์อัตราส่วน 1:5 แกน Z และแกน W ขับเคลื่อนด้วยบอลสกรูกราวด์แบบน็อตคู่ที่มีเส้นผ่านศูนย์กลาง 32 มม. ตามลำดับ และเซอร์โวมอเตอร์ขนาด 1kW รางนำประกบสองชุด และข้อต่อสำหรับการขับขี่ แกน Y คือแกนฟีดแบ็คเกจ โดยส่วนใหญ่จะควบคุมระยะห่างระหว่างร่องการประมวลผลแผ่น ติดตั้งอยู่บนโครง backgauge ของโต๊ะทำงาน ประกอบด้วยบอลสกรูน็อตเดี่ยวเส้นผ่านศูนย์กลาง 32 มม. รางนำเชิงเส้นขนาด 30 มม. และสายพานซิงโครนัสขนาด 8 มม. ล้อซิงโครนัสอัตราส่วน 1:2 ขับเคลื่อนด้วยเซอร์โวมอเตอร์ 2kW
5.2. เครื่องเซาะร่องโครงสำหรับตั้งสิ่งของ
ก. แท่นทำงานเตียงของเครื่องเซาะร่องได้รับการออกแบบให้มีความสูงที่เป็นมิตรต่อผู้ใช้ประมาณ 700 มม. ซึ่งสามารถยกได้อย่างราบรื่นด้วยคน 2 คน และบรรทุกได้โดยไม่มีสิ่งกีดขวาง รางนำทางเชิงเส้นหลักและเสริมด้านซ้ายและขวาได้รับการออกแบบให้ติดตั้งบนทั้งสองด้านของโต๊ะทำงาน เครื่องเซาะร่องโครงสำหรับตั้งสิ่งของแบบขับเคลื่อนเดี่ยว มีการติดตั้งชั้นวางไว้ที่ด้านควบคุมการทำงาน ชั้นวางของเครื่องเซาะร่องโครงสำหรับตั้งสิ่งของแบบขับเคลื่อนสองด้านได้รับการติดตั้งไว้ทั้งสองด้านของเตียงโต๊ะทำงาน
b. การขับเคลื่อนของเครื่องเซาะร่องแบ่งออกเป็น X (แกนลำแสง), Y (แกนการเคลื่อนที่ของที่จับเครื่องมือด้านซ้ายและขวา), Y2 (แกนการเคลื่อนที่ของตีนผีด้านหน้าซ้ายและขวา) และแกน Z (แกนการเคลื่อนที่ของที่จับเครื่องมือขึ้นและลง) แกน X ขึ้นอยู่กับความยาวของการแปรรูปโลหะแผ่นเป็นหลักและเป็นแกนตัดหลัก ติดตั้งอยู่บนโครงสำหรับตั้งสิ่งของและเคลื่อนผ่านมอเตอร์สปินเดิลขนาด 5.5 กิโลวัตต์ ตัวลดรูปดาวอัตราส่วน 1:5 สายพานซิงโครนัสขนาด 8 มม. และล้อซิงโครนัสอัตราส่วน A 1:1 จำนวน 2 ล้อ เฟืองเกลียวแบบอัลลอยด์ 3 ดาย และชั้นวางแบบเกลียวที่ติดตั้งอยู่บนเตียงสำหรับการขับขี่ แกน Y1 และ Y2 นั้นเป็นแกนฟีดที่เคลื่อนที่ตามลำดับ ซึ่งควบคุมขนาดของระยะห่างระหว่างช่องเป็นหลัก เมื่อใช้แกน Y1 สำหรับการประมวลผลตัวจับยึดเครื่องมือ แกนตำแหน่งของขนาดการประมวลผลที่ต้องการจะถูกติดตั้งบนโครงสำหรับตั้งสิ่งของด้วย โดยใช้เซอร์โวมอเตอร์ 1 กิโลวัตต์ สายพานซิงโครนัสขนาด 8 มม. ล้อซิงโครนัสสองตัวที่มีอัตราส่วน 1:1.5 และรางนำทางเชิงเส้นตรงขนาด 30 มม. สองราง (รางนำทางด้านบนมีที่นั่งแบบเลื่อนได้ 2 ที่นั่ง และรางนำทางด้านล่างมีที่นั่งแบบเลื่อนได้ 3 ที่นั่ง) ขับเคลื่อนด้วยบอลสกรูน็อตตัวเดียวที่มีเส้นผ่านศูนย์กลาง 32 มม. แกน Y2 คือแกนแท่นเลื่อนด้านซ้ายและขวาของตีนผีเย็บผ้าด้านหน้า ซิงโครไนซ์กับ Y1 พวกเขาทั้งหมดจะได้รับคำแนะนำในการป้อนมิติการประมวลผลพร้อมกันและวิ่งไปยังตำแหน่งที่ต้องการ แกน Y2 ติดตั้งอยู่ภายในส่วนล่างของเตียงและผ่านเซอร์โวมอเตอร์ขนาด 1 กิโลวัตต์ สายพานไทม์มิ่งขนาด 8 มม. ล้อซิงโครนัส 2 ล้อที่มีอัตราส่วน 1:1.5 บอลสกรูน็อตตัวเดียวที่มีเส้นผ่านศูนย์กลาง 32 มม. และแท่งขัดเงาชุบโครเมียม 2 อันที่มีเส้นผ่านศูนย์กลาง 45 มม. ใช้ในการขับเคลื่อน แกน Z คือแกนฟีดของที่จับเครื่องมือ ซึ่งส่วนใหญ่จะขึ้นอยู่กับความลึกของวัสดุแผ่นที่จะประมวลผล มันส่งผ่านเซอร์โวมอเตอร์ขนาด 1 กิโลวัตต์ บอลสกรูแบบน็อตคู่ขนาดเส้นผ่านศูนย์กลาง 32 มม. และรางนำเชิงเส้นตรงขนาด 35 มม. สองตัว (แต่ละตัวมีตัวเลื่อนสองตัว) และข้อต่อสำหรับขับเคลื่อน
c.หากเครื่องเซาะร่องได้รับการออกแบบให้มีไดรฟ์คู่และเพิ่มแกน X2 แกน X2 จะถูกออกแบบให้ทำงานพร้อมกันกับแกน X1